Surpise, surprise, it works!

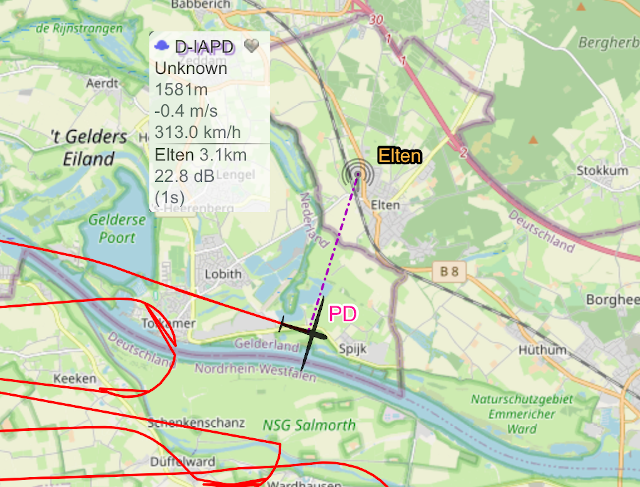
After building a nicer box for the electronics, I used my Acrowot as the test-bed of choice, the motor mount is loose, the battery is 7 years old, but hey, just enough oomph for a test. Anyways, looking at the data, I am very happy. My receiver on the shed even picks up the signal … Read more