

After building a nicer box for the electronics, I used my Acrowot as the test-bed of choice, the motor mount is loose, the battery is 7 years old, but hey, just enough oomph for a test. Anyways, looking at the data, I am very happy. My receiver on the shed even picks up the signal when I am in the pits, I had not expected that. Higher up is no surprise of course. The signal is much stronger than what I usually get from Real Planes. (Our field is only 1.3 km from my receiver. I do catch full size planes as far as 30 km away, when I have a clear line of sight.)
There’s more info about the story here.


So, now it’s a matter of putting this contraption in the bigger planes, and get some more data. Don’t forget this is built for full-size aircraft, to allow them to spot nearby traffic. When you see 1900 foot/minute ascends of this tracker, you know it’s either a UFO or a model-airplane! The number of data points is relatively low, but enough to make them big ones know I am there! I took this image while in the pits, plane on the picknick table: still 4.5 dB signal, even though there are buildings and trees in the way. Speed is of course determined by GPS readings. Even when stationary, it will show movement. (All GPS-es do this, usually it’s the software that filters this away, but we likes the real stuff, not all smoothed)
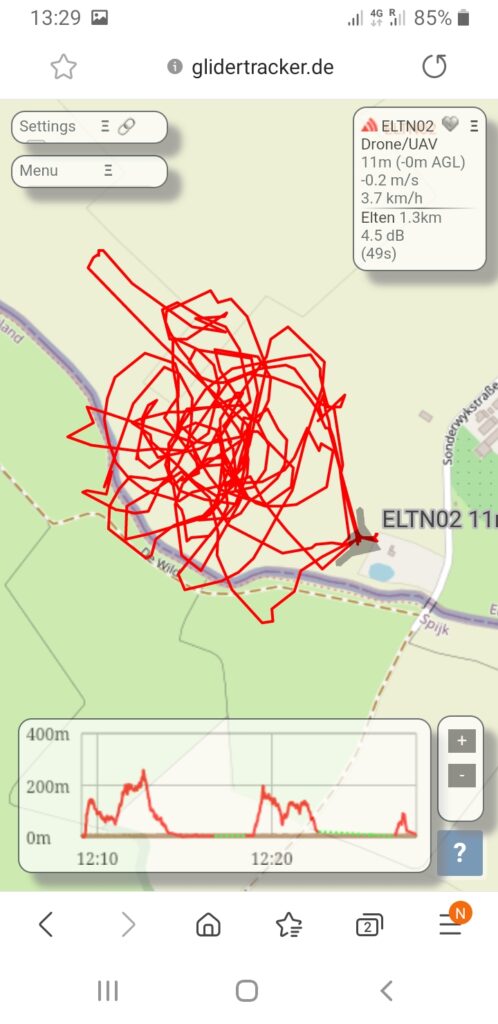
As you can see on the heatmap above, lots of data when I was in the pits, sorting out my ailerons (reversed) motor (reversed). I also noticed that the fixed motor mount is more of a flexi-mount at the moment. It explains the funny behavior of the plane at full power. Anyway, not worried about that, that was not part of the exercise. Below is some raw data: (first number is time in GMT, then coordinates, altitude, rate of change, acend/decend, heading, and some more stuff relating to reception of the signal.)
122704: [ +51.86655, +6.15268]deg 3m +5.3m/s 3.2m/s 341.7deg +0.0deg/s Dm4 03x05m Fn:00_o_ -0.86kHz 4.5/20.5dB/2 1e 1.3km 185.1deg -0.8deg ! * 3 meter altitude, 20.5 dB signal!
122207: [ +51.86728, +6.15048]deg 103m -3.9m/s 20.0m/s 059.7deg +0.0deg/s Dm4 03x05m Fn:00_o_ -0.76kHz 13.5/27.0dB/0 0e 1.3km 192.3deg +3.5deg and 100 meter, 27 dB. I honestly had not expected those numbers.
And from GliderRadar more raw data: even going down in a hurry (2000 ft/min) it tracks nicely. The highest altitude recorded was 784 ft, (239 meter) which of course is also nicely shown on glidertracker.
12/18/2020 1:27:37 PM+01:00: FLR66052A>OGFLR,qAS,Elten:/122736h5152.08N/00609.05E'071/037/A=000285 !W53! id3666052A -1979fpm +0.0rot 11.2dB -0.9kHz gps3x5After seeing this, there is no need to try to build a better antenna, these stubs do rightly!
And just to explain why I did all this: The picture below tells the story, a full size heli, flying at 93 meters, at well over 100 km/hr, where I was a few minutes earlier. Next time he does that, he will get lots of alarm bells in his ears!

With this subject out of the way, I can start making snow for Xmas again! (More sanding wings…)
I hear someone thinking: If I wanted to use something like this, but I am not near a groundstation, would that work?
I am sure I could use a mobile receiver setup, and link to ye interwebs through a GSM phone. The amount of data is not high, only what the receiver sees from passing full size traffic and whatever you fly yourself. Sounds like a project, most of the stuff is looking at me.
- Raspberrypi, connected to GSM as hotspot: easy
- RTL-SDR dongle: got it
- Antenna : done, it does not have to be high, since you only want local traffic.
- Some Battery for power: take your pick
- But if I don’t have a GSM/Signal? You never worried before, just keep on flying!
Sounds like a fun project, lets do it!